I wish I had seen Ladyada’s blog about getting off the fence about kicad before she closed comments to it. I just ran up kicad on my mac and its still not ready for prime time. The worst part of it is that the designs that are in kicad are stuck in kicad.
It scared me, because I thought that if adafruit adapted kicad as apposed to eagle as it has been, it would mean is that adafruits designs would no longer be open to people who are not using kicad. For those of us who use the automation, meta data, and well developed shared libraries of eagle this is a great loss.
Especially when the very tools which are missing from kicad make it easy to convert eagle designs to kicad or any other platform. A gerber is not the same as having the parts list, schematic and the plethora of other meta data that sharing a design really entails. It is the source code of a design.
If I give you an eagle schematic file you are free to improve upon my design or export it to the cad software of your choice. If I gave you a set of gerbers you are stuck with my design but are perfectly capable of shipping them off to the cheapest asian fab you can find.
Since kicad locks this data away and does not allow you to export the design and its meta data I am going to argue that it is not really open source. Unless I can recreate a different design or change the usb processor or the package of the parts outside of kicad or at least all 3 major platforms (ie on a Macintosh) in my opinion kicad projects are not open source at all.
I know the joy of open source is that its my fault for not donating countless man-months of time debugging and adding features like eagles ULP and usability on OSX. But I don’t care because in EDA the design is the source. Cadsoft paid and continues to pay its software engineers to create a professional cad system which allows the open sharing of design and metadata and then offeres it to us for free.
While the kicad community has been very quick to capitalize on eagles exposure of the communities shared source and libraries, very little has been done to make sure that we are not stuck with a single design platform that is not nearly as well developed.
Even worse, as people who we look to consistently for reference designs like ladyada turn to kicad, those of us who want to use and share designs can look forward to manually rebuilding them.
I thinks its a damn shame.
- http://www.adafruit.com/blog/2011/09/01/kicad-vs-eagle-go/
- http://code.google.com/p/fritzing/issues/detail?id=921
- http://www.edaboard.com/thread163500.html
- http://forums.reprap.org/read.php?13,3997
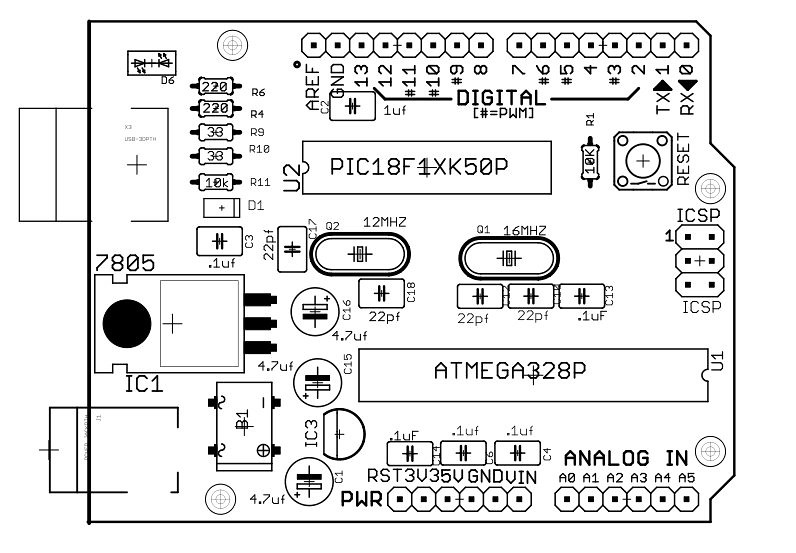






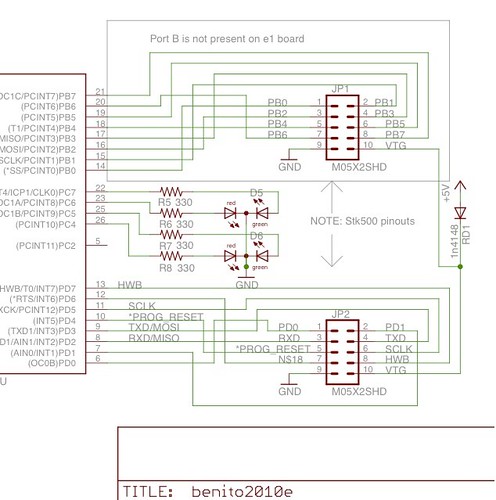
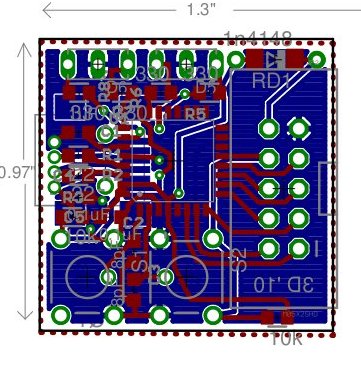
 One of the benefits of having laens pcb order available is that I can test design changes iteratively and explore other possibilities. The benitos i am using in the induction this month are the result of three iterative changes based on the original Benito and a redesign done by Monty Goodson a few years back. They (the benito2010d) will be the last of the design to use the pinouts of the origional benito. Fot the end users the biggest change will be that the cable will be a mini-b like the one used on the teensy.
One of the benefits of having laens pcb order available is that I can test design changes iteratively and explore other possibilities. The benitos i am using in the induction this month are the result of three iterative changes based on the original Benito and a redesign done by Monty Goodson a few years back. They (the benito2010d) will be the last of the design to use the pinouts of the origional benito. Fot the end users the biggest change will be that the cable will be a mini-b like the one used on the teensy.